Разборка Project Tango

Введение
На дворе 2014 год, и будущее уже наступило. Инженеры Google усердно работают над воплощением виртуального в реальность с помощью таких проектов, как Google Glass и новейшая технология 3D-картографии Project Tango. Мы получили в свои руки один из прототипов Tango, и нам не терпится его испытать. Присоединяйтесь к нам, чтобы попробовать Tango Delta (это 'Teardown' для тех, кто не знает их фонетического алфавита) этого телефона для разработчиков, оснащенного камерой.
Погрузитесь в наш виртуальный мир, следя за разговорами о технологиях в нашем Twitter, найдите футуристическую дружбу в Facebook или насладитесь мгновенными фотографиями в нашем Instagram.
Что вам нужно
Инструменты

Отвертка Phillips #000 | Источник - ifixit.com 
Инструмент для открывания iFixit | Источник - ifixit.com 
Пинцет | Источник - ifixit.com
Шаг 1 Разбор проекта Tango



Project Tango - это, по сути, набор камер и датчиков, который работает на телефоне под управлением Android. Google не поделилась многими характеристиками, помимо набора камер, но мы раскопали немного больше:
Четырехъядерный процессор Snapdragon 800 (до 2,3 ГГц на ядро) с 2 ГБ оперативной памяти LPDDR3
64 ГБ встроенной памяти с возможностью расширения за счет microSD
5-дюймовый ЖК-экран
9-осевой акселерометр/гироскоп/компас
И, конечно же, система датчиков глубины: инфракрасный проектор, 4 МП камера RGB/IR на задней панели и камера 'рыбий глаз' с углом обзора 180º на задней панели.
Шаг 2


Несмотря на то, что Google может держать голову в облаке, они позаботились о возможности аппаратного подключения.
В Tango есть несколько портов, все они свободны от этих раздражающих пластиковых дверей:
Micro HDMI
Micro-USB
USB 3.0
А также способ эмоциональной связи - решетка микрофона. Awww.
{kind=link}
Шаг 3



Чтобы снять заднюю крышку Tango и получить доступ к аккумулятору, достаточно ногтя большого пальца. (Впрочем, большой палец тоже пригодился бы).
Крышка снята, аккумулятор извлечен. Все просто. Мозги разработчиков Tango были направлены на то, что находится внутри телефона, а не на причудливые скошенные края или изогнутых металлических корпусах unibody..
Tango несет в себе мощный аккумулятор емкостью 3000 мАч, готовый к тому, чтобы разработчики довести его до предела.
3000 мАч - это, конечно, много для смартфона, но если бы не сверхнизкие требования к энергопотреблению сопроцессор технического зрения обеспечивающего работу 3D-изображений Tango, он должен был бы быть гораздо намного больше.
{kind=link}
{kind=link}
Шаг 4

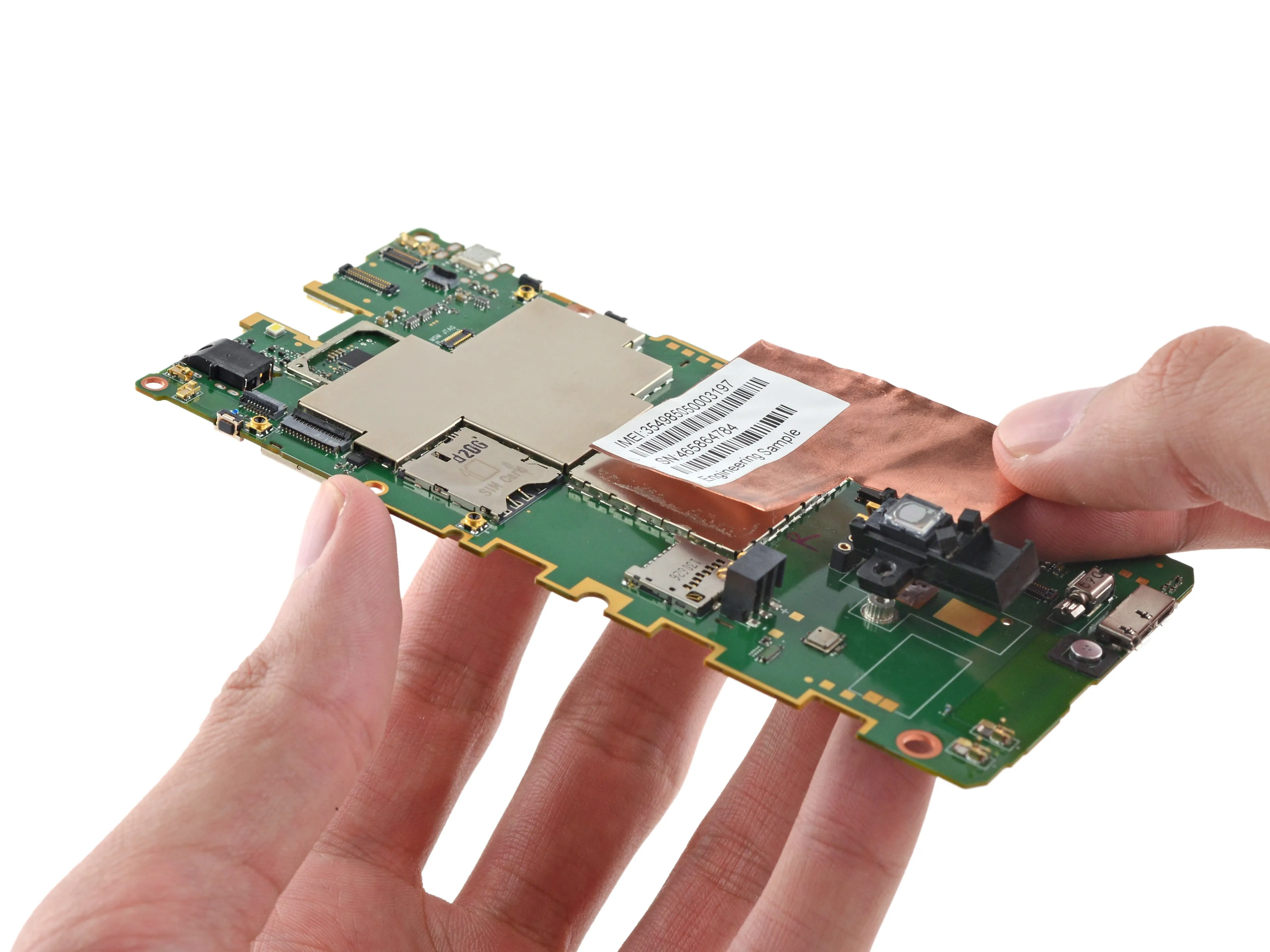
Сняв батарею, мы сразу же получаем доступ к материнской плате.
Но что более важно, открывается быстрый доступ к слотам SIM и microSD.
Хотя такая конструкция подразумевает несколько дополнительных шагов для извлечения карт, это также означает меньшее количество движущихся частей и механизм извлечения, который никогда не подведет.
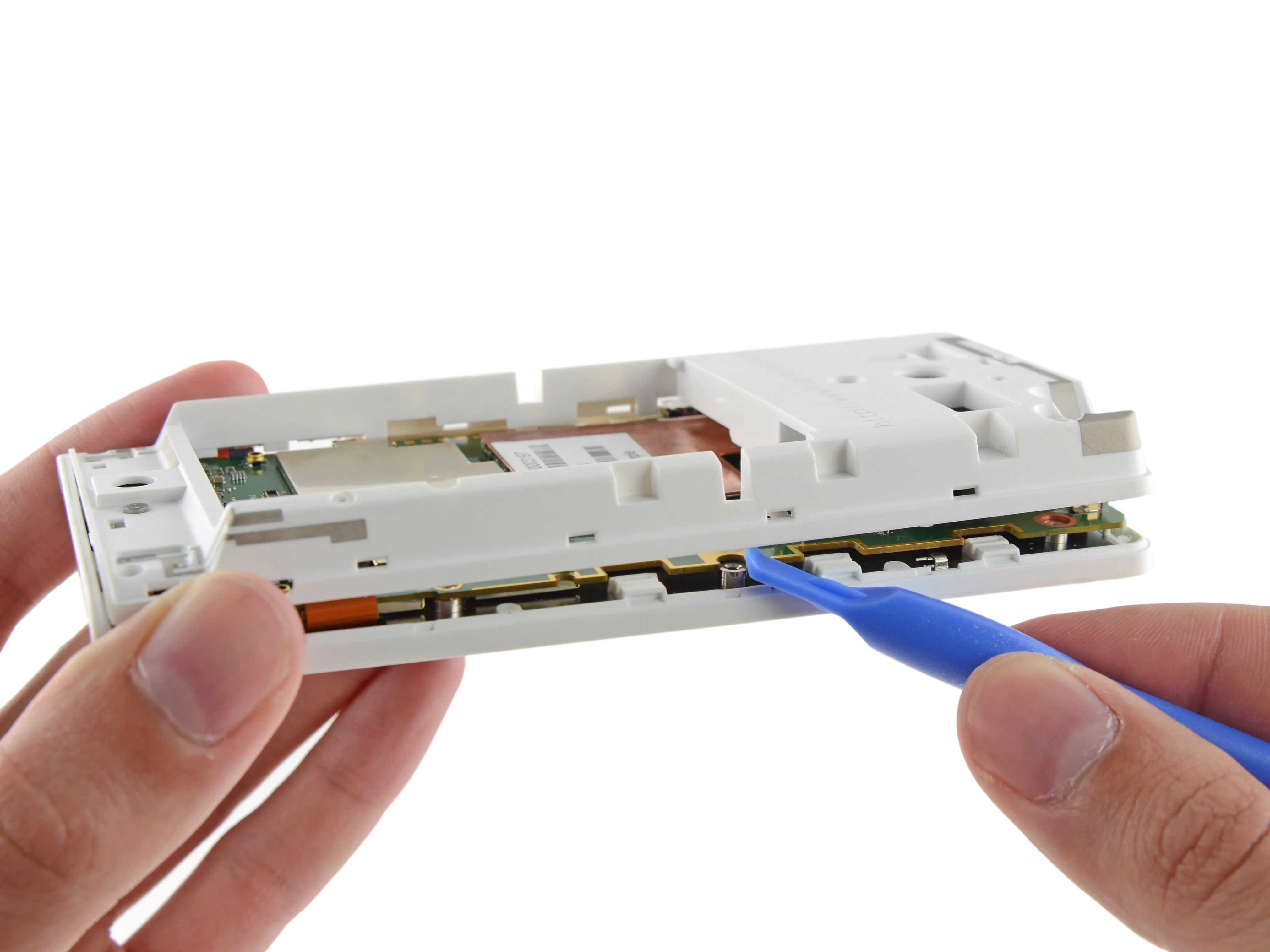
Поворот винтаПоворот винта, поддевание инструмента для открывания - и материнская плата полностью раскрыта.
Ни малейшего следа клея - только динамик с прижимными контактами. плотно прилегающий в средней рамке.
Средняя рамка, изготовленная компанией Kuang Fa Plating CoВ нем также находится несколько встроенных антенн, которые подключаются с помощью удобных пружинных контактов без проводов.
{kind=link}
Шаг 5


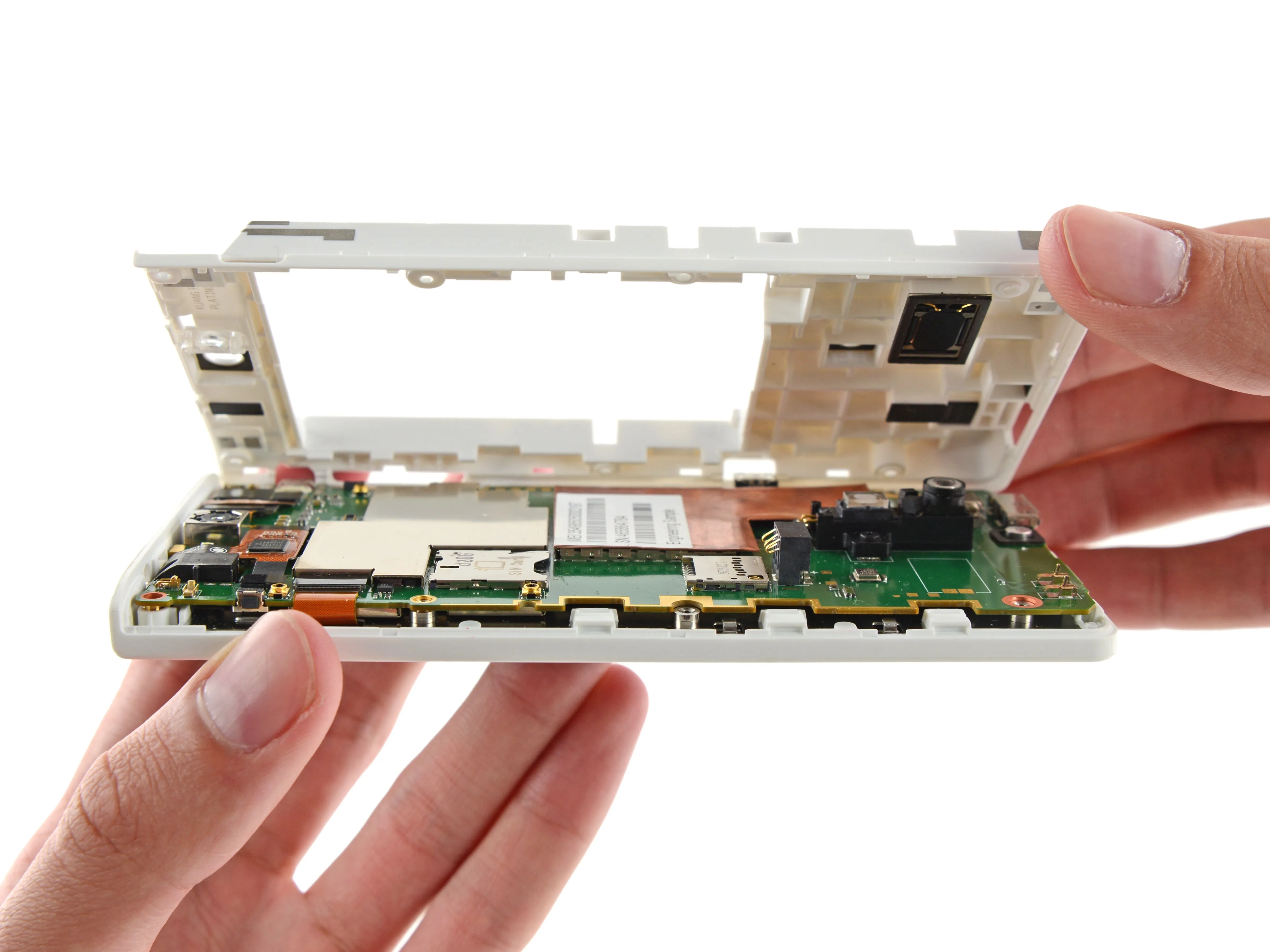
Несколько разъёмов, которые нужно отсоединить, несколько липких слоёв, которые нужно удалить, и материнская плата свободна.
Единственная цель Tango в жизни - привнести в нашу жизнь захватывающую технологию, которая до сих пор была доступна только на игровых приставках. игровыми консолями и марсоходами, на мобильную платформу.
Поэтому она не тратит время на броский внешний вид или тонкий корпус. Он просто упаковывает свои технологии в коробку самым простым способом. Это один из самых простых в разборке телефонов, с которыми мы сталкивались. Fairphone (или, в идеале, указателям ремонтопригодности).
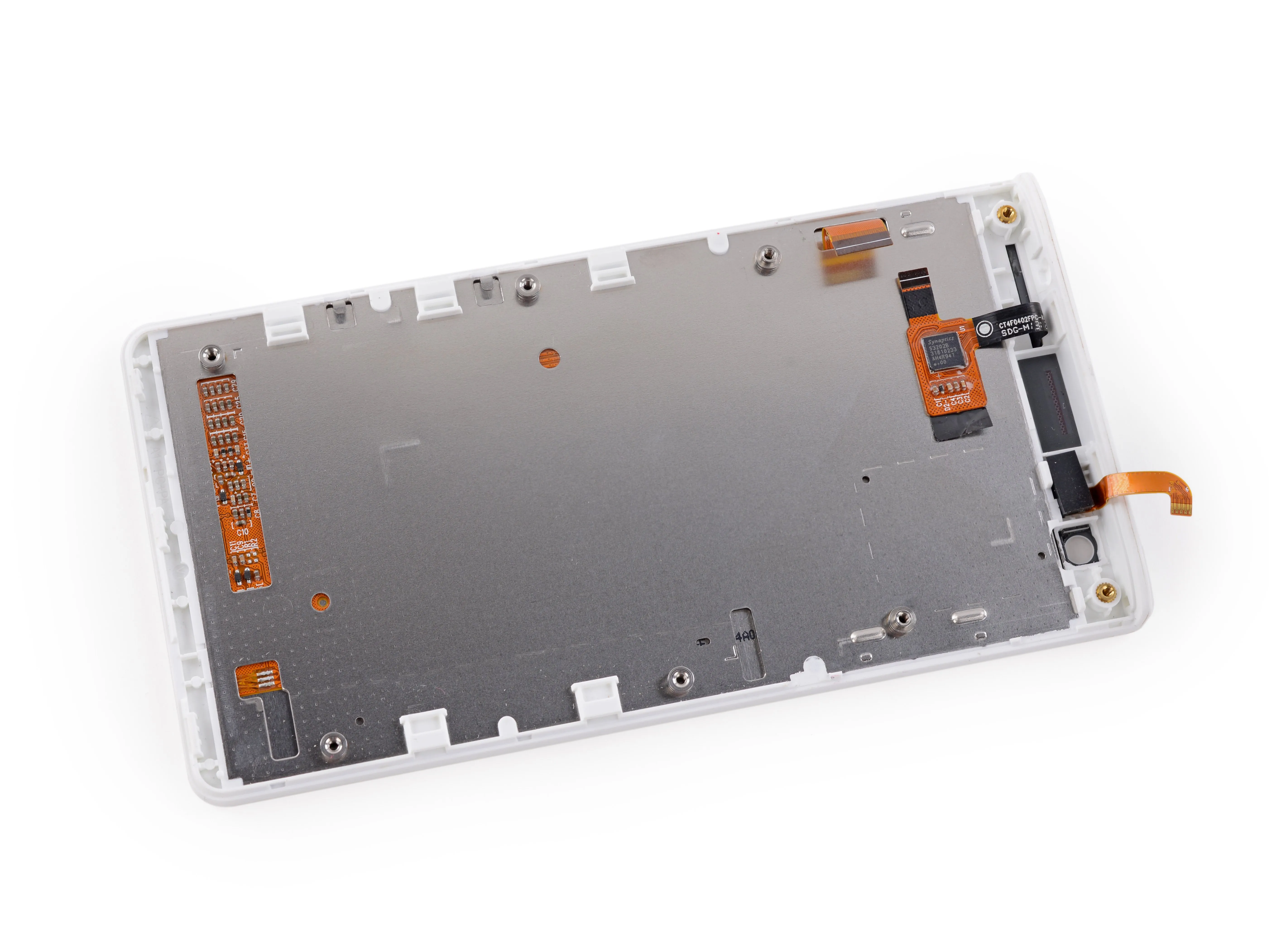
На 5-дюймовом дисплее установлен контроллер Synaptics S3202 ClearPad 3 series.
Шаг 6
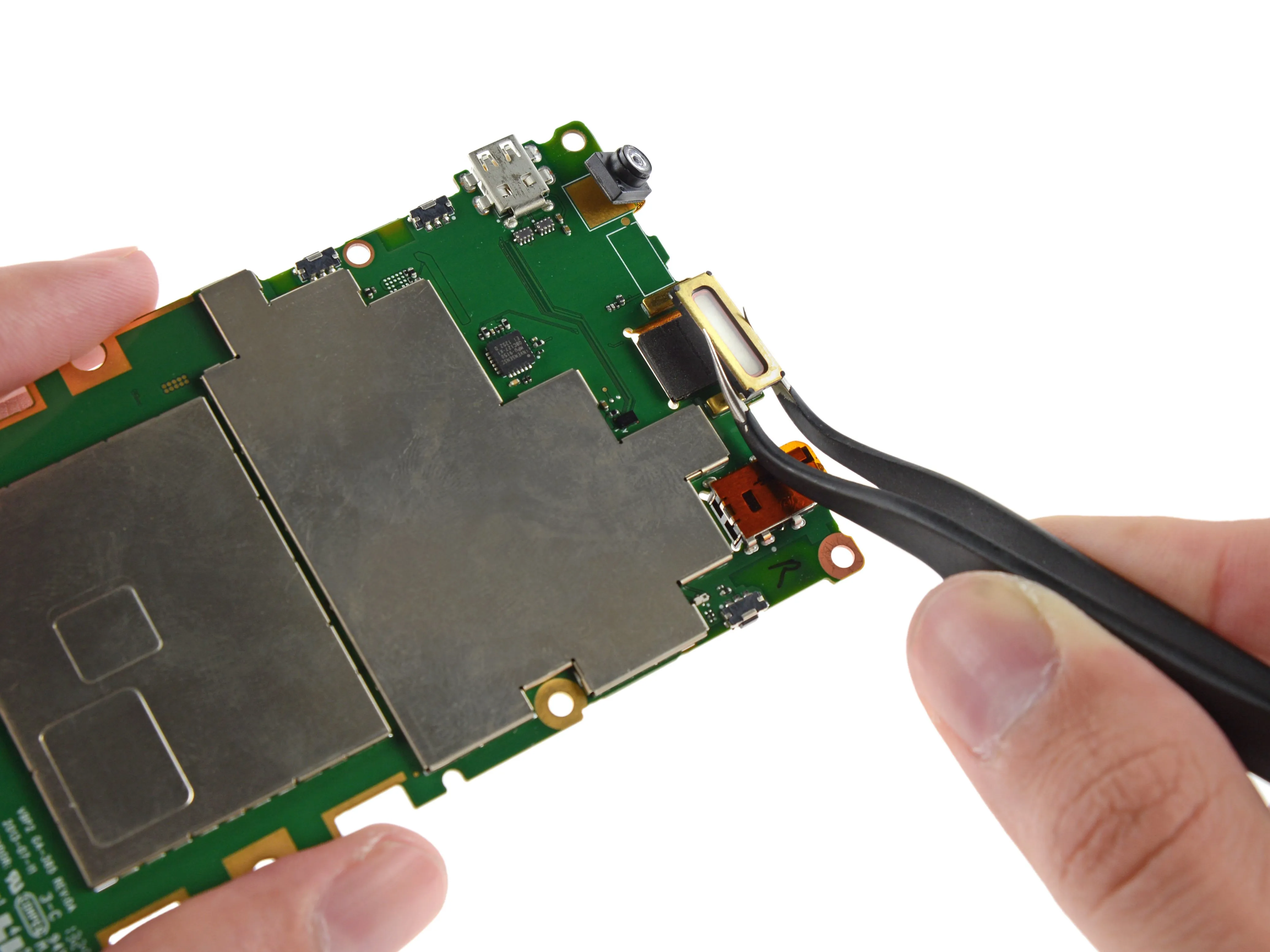


Вытаскиваем динамик наушника из легкого клея, удерживая его на прижимных контактах.
На сайте таинственная маркировка на этом сверхновом и сверхстандартном устройстве продолжают ускользать от нас. Наши поиски не приносят ничего полезного.
Далее на тарелке - две восхитительные камеры, 'солнечной' стороной вверх.
Selfie-камера имеет поле зрения 120º (FOV), что сродни (воспринимающему глубину) поле зрения человеческого глаза.
Таким образом, мы хотим сказать, когда вы снимаете селфи, камера смотрит на вас..
Стандартная камера Tango для мобильных телефонов - это 4 МП OmniVision с двумя RGB- и инфракрасными сенсорами, которые позволяют делать фото и видео высокого разрешения, а также воспринимать глубину.
{kind=link}
Шаг 7
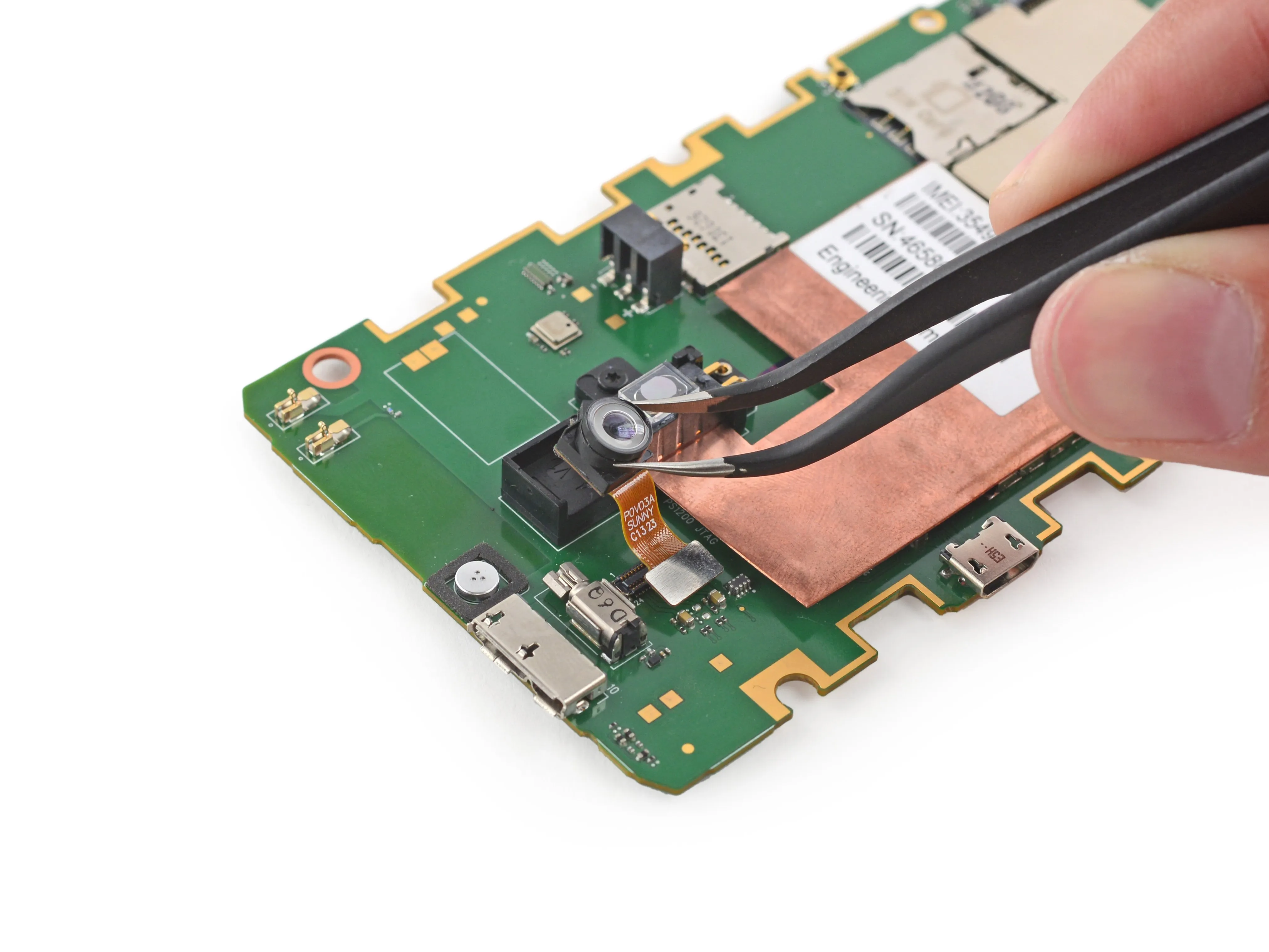
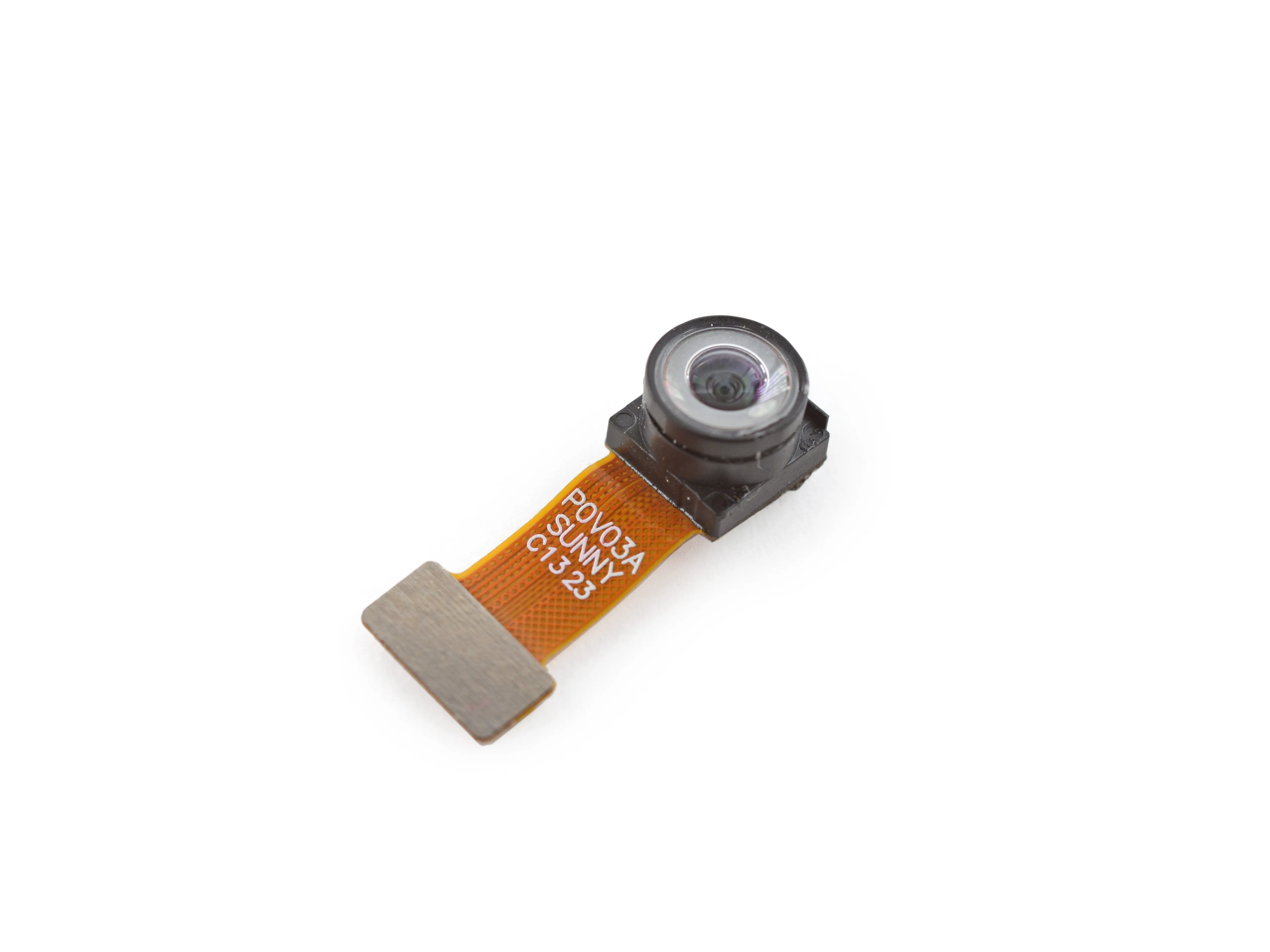
Очередной экземпляр рассыпается в прах. Или на приманку. Этот объектив 'рыбий глаз' закрывает маломощный чип OmniVision CameraChip.
Объектив 'рыбий глаз' обеспечивает угол обзора 180º, а сенсор балансирует между разрешением и частотой кадров в секунду, чтобы записывать черно-белые изображения для отслеживания движения.
Шаг 8
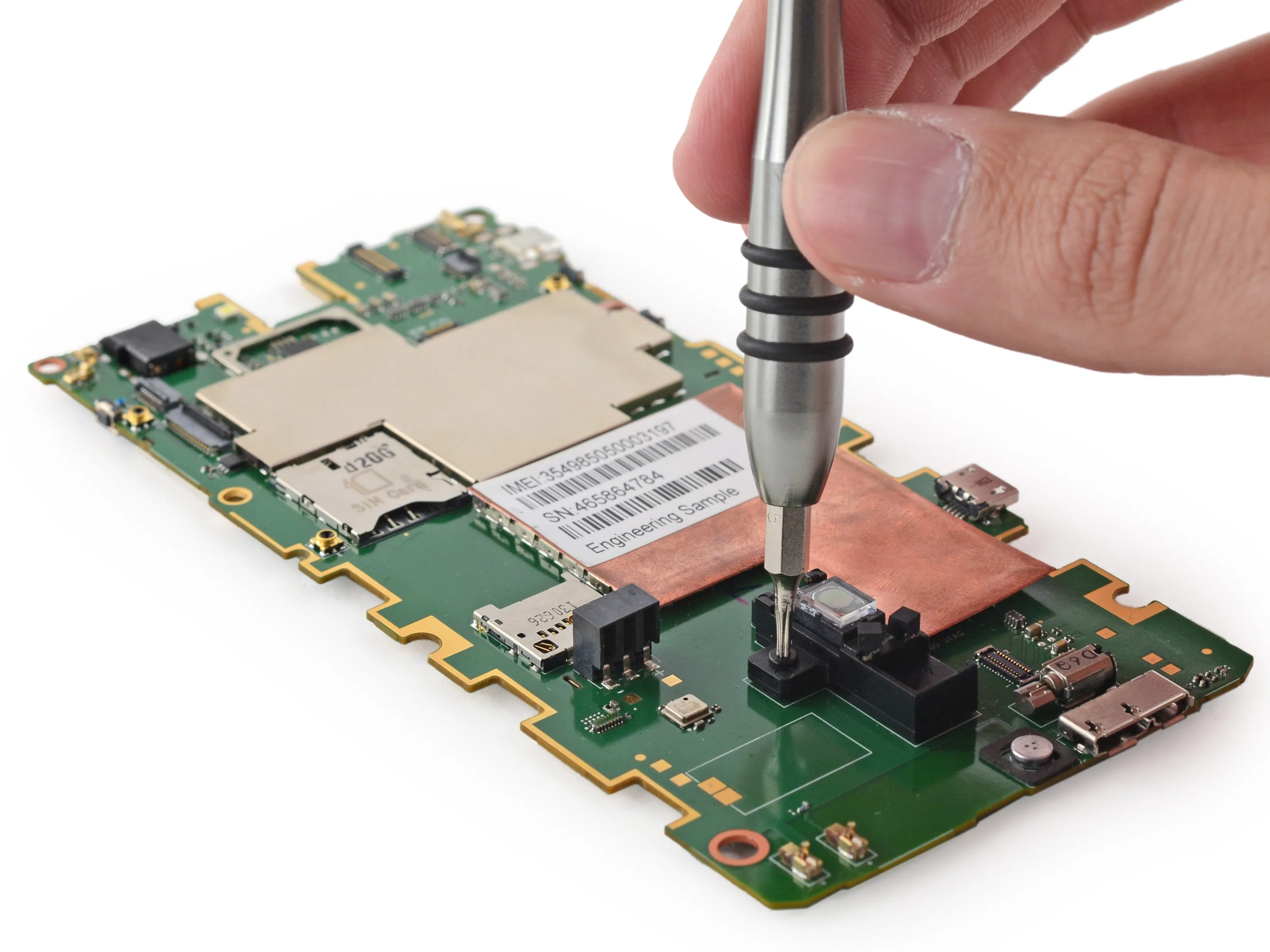

Огромный кусок меди обеспечивает электрическое заземление и теплоотвод для нижнего блока датчиков. Здесь должно быть очень тепло...
...И похоже, что мы нашли виновника - инфракрасный проектор. Глубоко внутри этой крошечной коробочки со стеклянным верхом живет ряд инфракрасных светодиодов, питающихся от довольно мощных проводов (для смартфона).
Шаг 9 Наука с Делаете.ру!
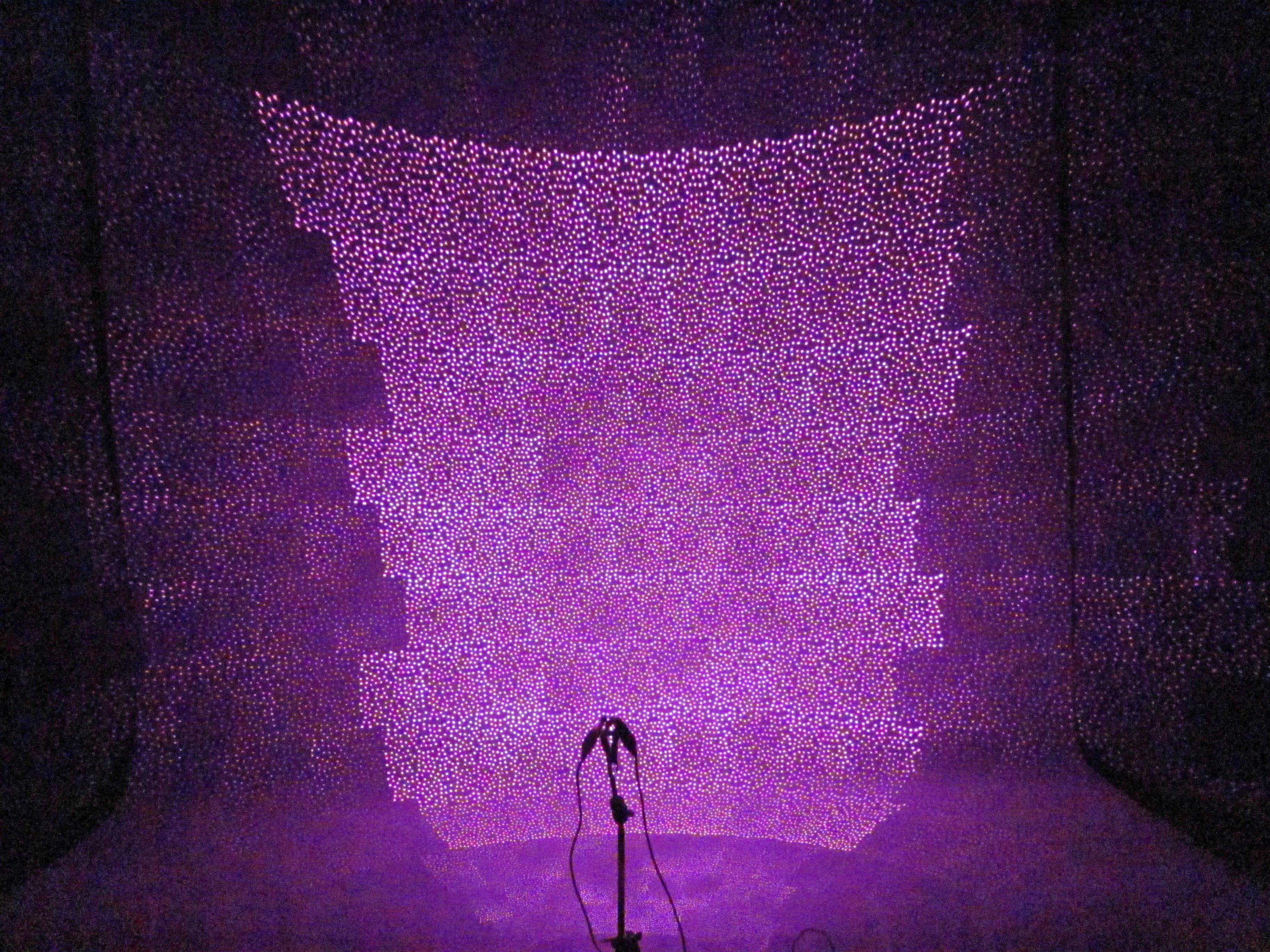
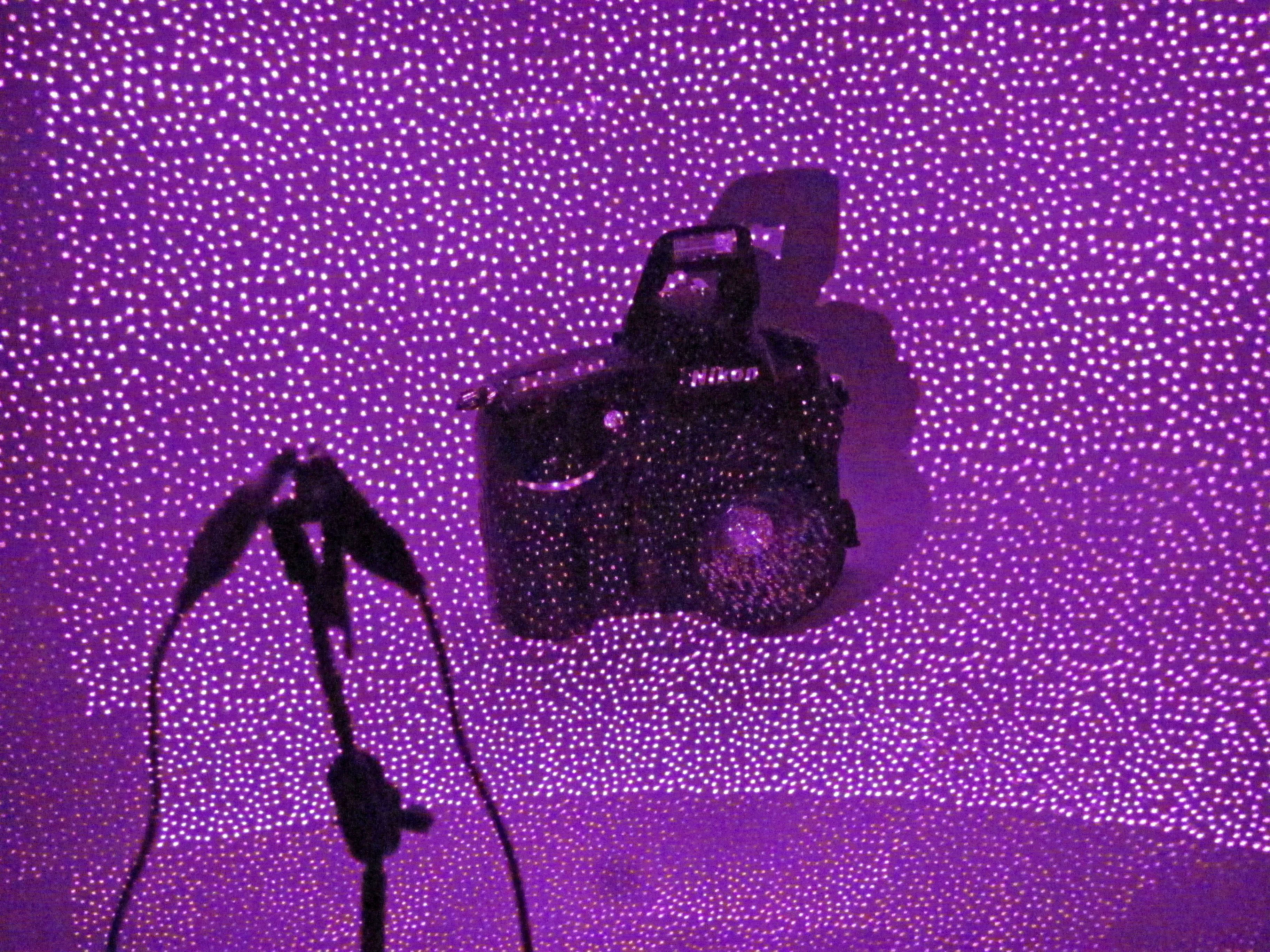
Google не хотела, чтобы мы включали наше устройство, поэтому нам пришлось придумать свой собственный способ включить ИК-проектор.
Немного аккуратного питания, немного самодельная ИК-камераи готово! Блестящие точки на стене фотокомнаты!
Яркая сетка точек показывает, что Tango работает так же, как и оригинальный Microsoft Kinectс сеткой точек, которые улавливаются ИК-датчиками 4-Мп камеры и строят карту глубины.
Как сетка точек строит карту глубины? С помощью науки.
Комментарии к шагу
Сомневаюсь, что они используют размер точки для измерения расстояния. Это очень похоже на технологию primesense в оригинальном Kinect. По сути, в механизме обработки один и тот же шаблон точек хранится в виде массива координат. Алгоритм выполняет кросс-корреляцию групп точек из захваченного изображения проецируемых точек с хранящимся шаблоном. Поскольку шаблон является псевдослучайным, каждая группа точек будет иметь уникальный отпечаток. Глубина/расстояние вычисляется по отклонению положения каждой точки в подгруппе от ее положения в хранящемся шаблоне.
Чтобы немного дополнить, рассмотрим сканер, который проецирует линию на объект и записывает ее с помощью камеры со смещением. Представьте, что проектор находится слева, камера - справа (оба направлены в стороны), а линия проецируется вверх и вниз. В этом случае смещение линии влево или вправо напрямую зависит от расстояния до сканера. Там, где линия проецируется на что-то близкое, она смещается влево, а там, где она проецируется на что-то далекое, она смещается вправо. Эта схема работает отлично, но она дает только одну полоску данных. Чтобы получить полную картину, нужно просканировать ее по всей сцене.
.
Эта установка делает то же самое, только вместо линии она проецирует точечный рисунок. Измеряя смещение каждой точки, можно определить, как далеко она находится от камеры. Точки расположены особым образом, чтобы логика могла отличить одну от другой. Поскольку точки покрывают всю сцену, вам не придется ее сканировать.
Спасибо за предупреждение, ребята. Мы поняли, что ошиблись, вскоре после того, как выложили этот обзор, поэтому мы обновили шаг :)
Шаг 10
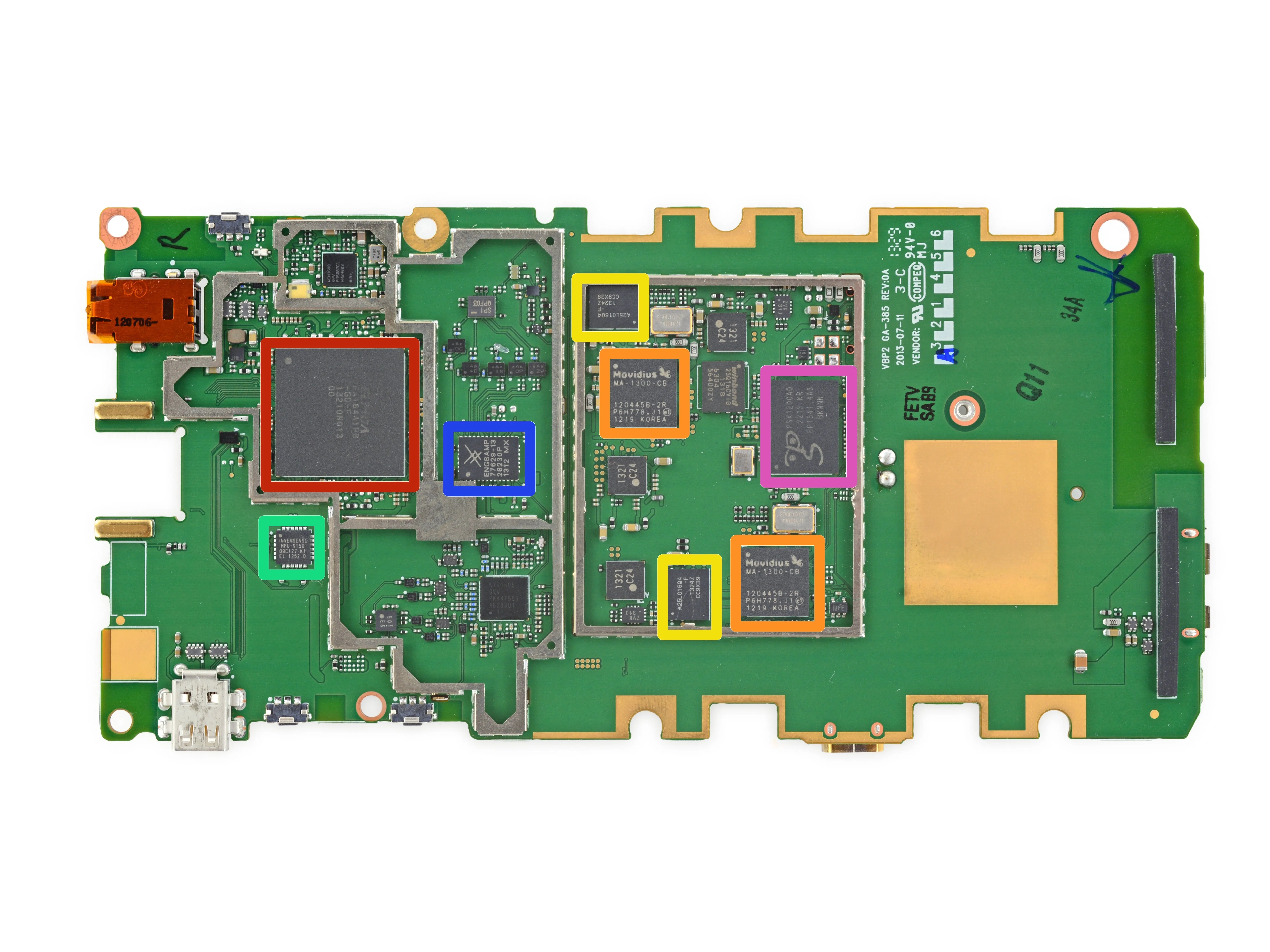
Что готовится в Tango?
Elpida FA164A1PB 2 ГБ оперативной памяти LPDDR3, расположенной поверх Qualcomm 8974 (Snapdragon 800) процессором
Два Movidius Myriad 1 сопроцессоры компьютерного зрения.
Два AMIC A25L016 ИС последовательной флэш-памяти с низким напряжением 16 Мбит.
InvenSense MPU-9150 9-осевой гироскоп/акселерометр/компас MEMS для отслеживания движения
Skyworks 77629 многомодовый многодиапазонный модуль усилителя мощности для четырехдиапазонного GSM/EDGE
PrimeSense PSX1200 Capri PS1200 3D сенсорная SoC
Комментарии к шагу
Синий в шаге 10 - это Skyworks PA, а не Winbond W25Q16CV 16 Mbit SPI flash.
Есть еще один 9-осевой IMU - Bosch Sensortec BMX055. Он находится на второй картинке под буквой 'R'.
Шаг 11
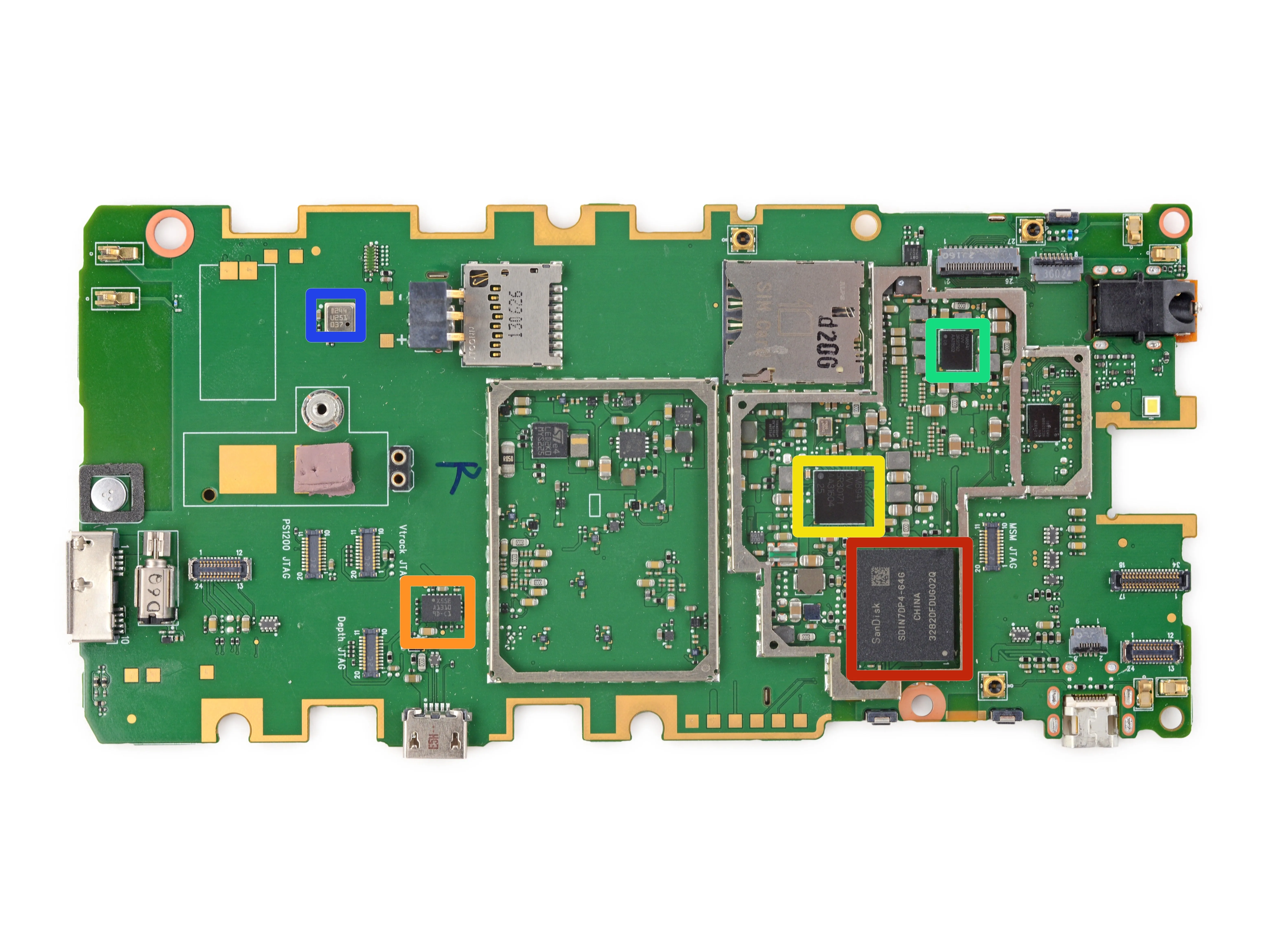
На задней стороне платы находятся:
датчик давления Bosch Sensortec BMP180
SanDisk SDIN7DP4-64G Флэш-память iNAND объемом 64 ГБ
Bosch BMX055 IMU
Qualcomm PM8941 ИС управления питанием
Qualcomm PM8841 ИС управления питанием
Шаг 12
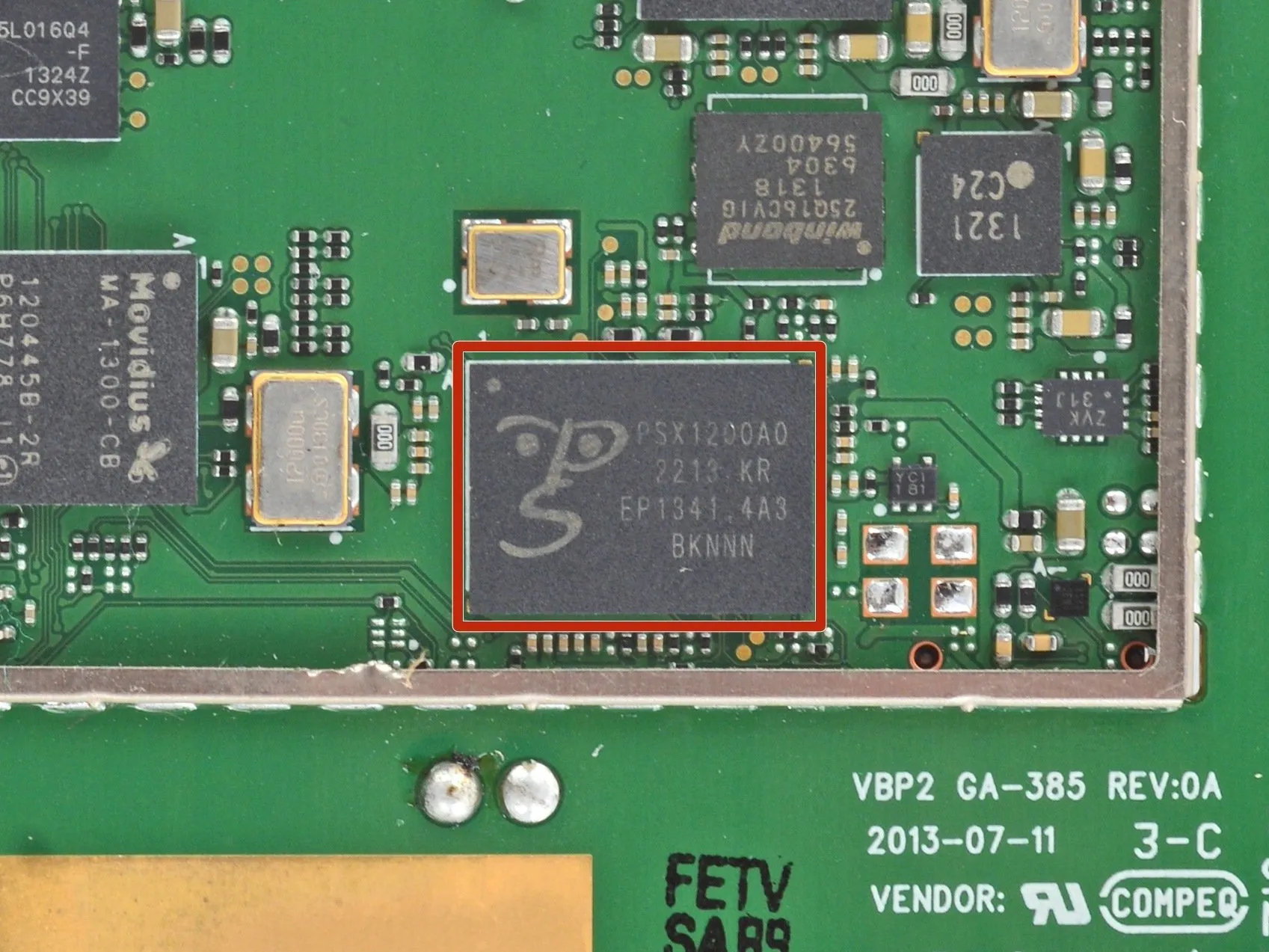
Попридержите лошадей, что это? Мы обнаружили в Tango несколько неожиданных новых технологий.
Судя по всему, это новый процессор PrimeSense Capri PS1200 SoC чип для создания 3D-изображений, неожиданный по нескольким причинам:
Только в прошлом году Apple купила PrimeSense, производителя оборудования для 3D-видения Kinect. Спекулянты предполагали, что мы увидим это новое 'горячее' оборудование в грядущем iOS-устройстве, предназначенном для отображения 3D-пространств. Похоже, что Tango опередила Apple с их собственной технологией?
Также интересно, что компания Movidius много времени в центре внимания в последнее время, как преемник 3D-трона PrimeSense с низким энергопотреблением, наконец-то получивший решение для мобильных устройств. Так что же PrimeSense делает здесь, рядом с Movidius?
Шаг 13


Хотя этот сверхсекретный прототип вряд ли можно назвать потребительским устройством, мы с удовольствием ставим ему оценку за ремонтопригодность, тем более что он может служить примером того, насколько простой может быть конструкция смартфона.
Оценка ремонтопригодности Project Tango: 9 из 10 (10 - самый простой в ремонте).
Батарею можно заменить за несколько секунд без каких-либо инструментов.
Семь винтов удерживают все устройство вместе.
Несколько модульных компонентов можно заменить самостоятельно: динамики, камеры (все три!), ИК-проектор и дисплей в сборе.
Несколько компонентов остаются припаянными к материнской плате, что усложняет их замену. К ним относятся вибромотор и USB-порты.
Комментарии к статье
'Как вы строите карту глубины? Нам кажется, что близкие точки меньше, а дальние - больше. Измерьте размер точки, и вы получите ее расстояние от проектора'.
Это не имеет смысла, поскольку с точки зрения камеры точки будут казаться одинакового размера (перспектива).
https://en.wikipedia.org/wiki/Binocular_d...
Если у вас есть два изображения одного и того же объекта с двух точек обзора, вы можете примерно рассчитать глубину изображения. В данном случае все немного иначе, поскольку одна из 'камер' на самом деле является проектором. Таким образом, одна точка обзора имеет 'идеальное' изображение, поскольку в ее кадре закодирован шаблон. Тогда вам просто нужна камера, чтобы записать проецируемое изображение и получить карту диспаратности между ними. По ней можно определить глубину.