Разборка Qoobo

Что вам нужно
Инструменты

Отвертка Phillips #0 | Источник - ifixit.com
Шаг 1 Снимите внешнюю крышку


Распакуйте и снимите.
Шаг 2 Открутите винты возле порта для зарядки
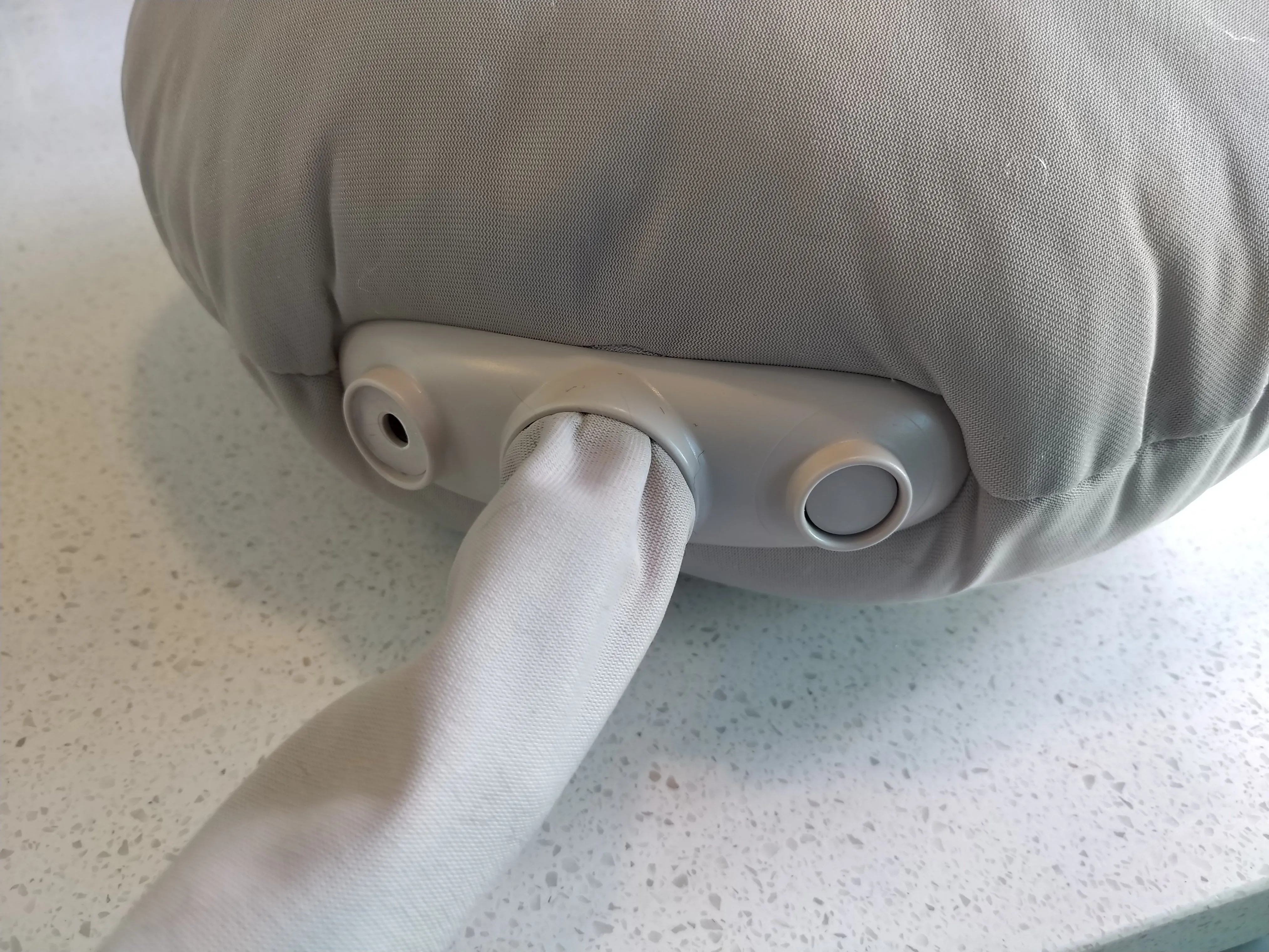

Снимите круглую наклейку вокруг порта зарядки. Откроются два винта, которые также следует удалить.
Шаг 3 Открутите винты под кнопкой питания
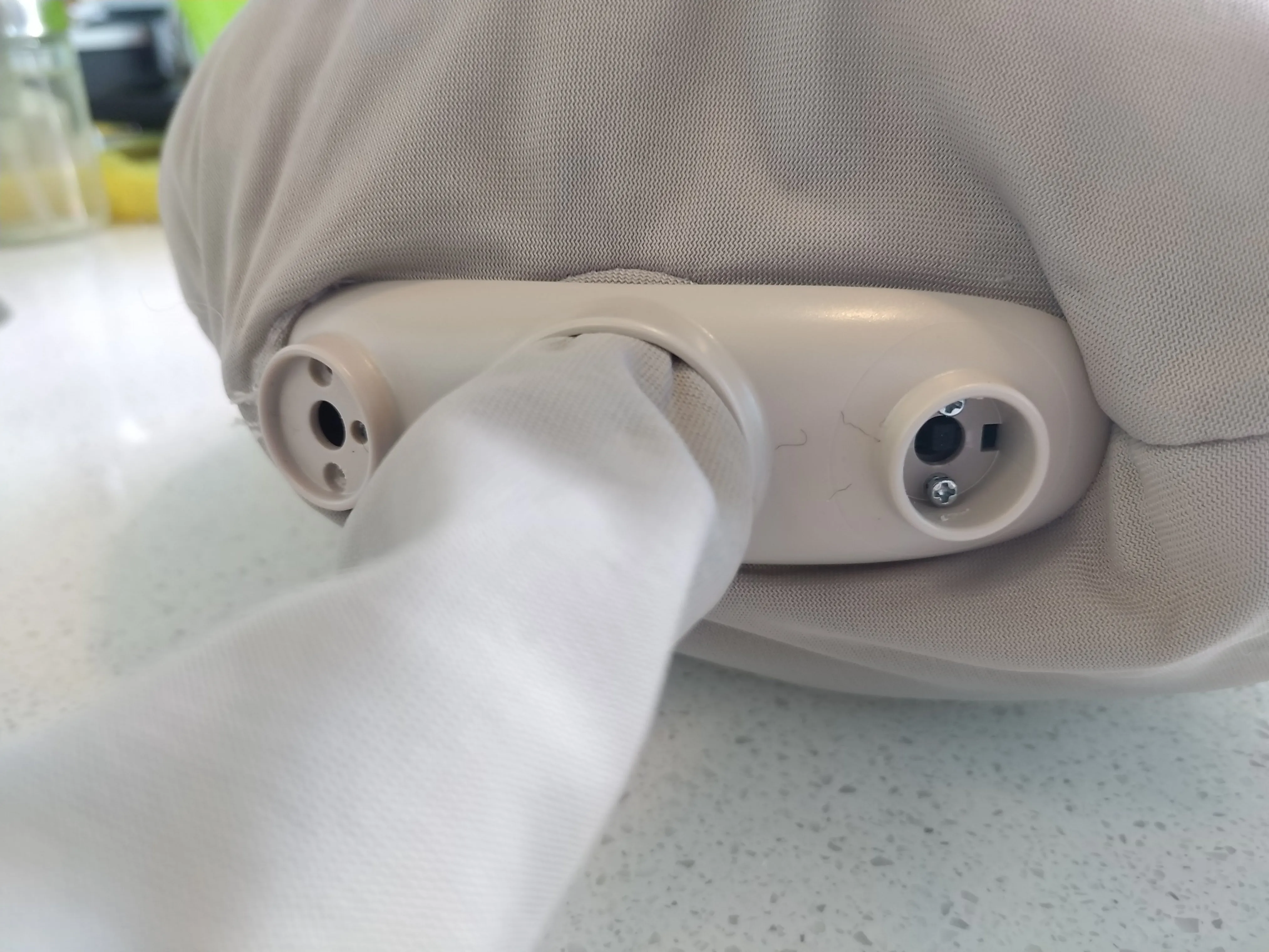
Кнопку питания можно поддеть маленьким ножом, открыв еще 2 винта.
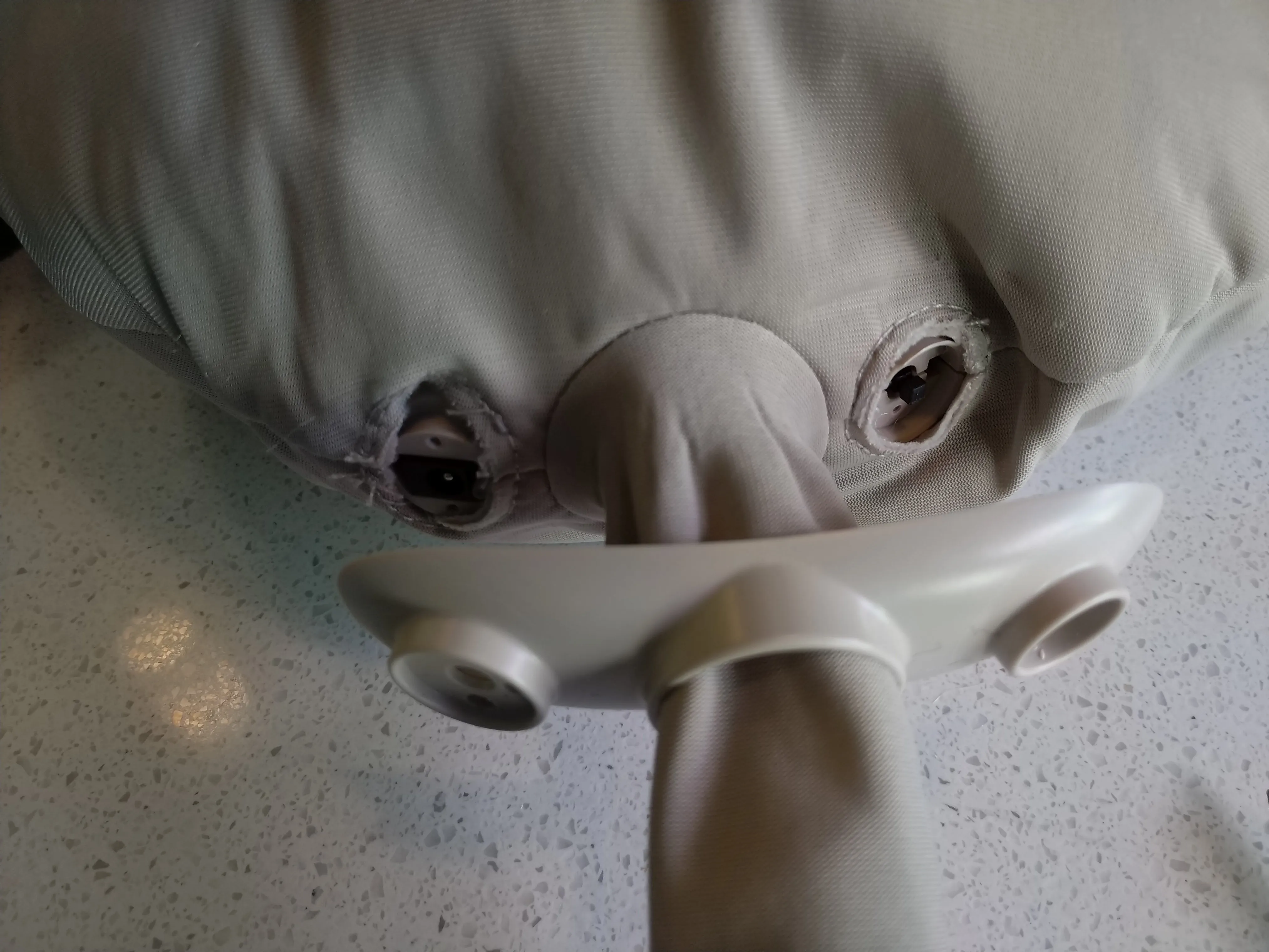
После удаления этих винтов пластиковая пластина должна освободиться и ее можно будет снять.
Шаг 4. Снимите внутреннюю оболочку подушки



Расстегните молнию внутренней тканевой оболочки и извлеките пластиковое 'сердце' устройства.
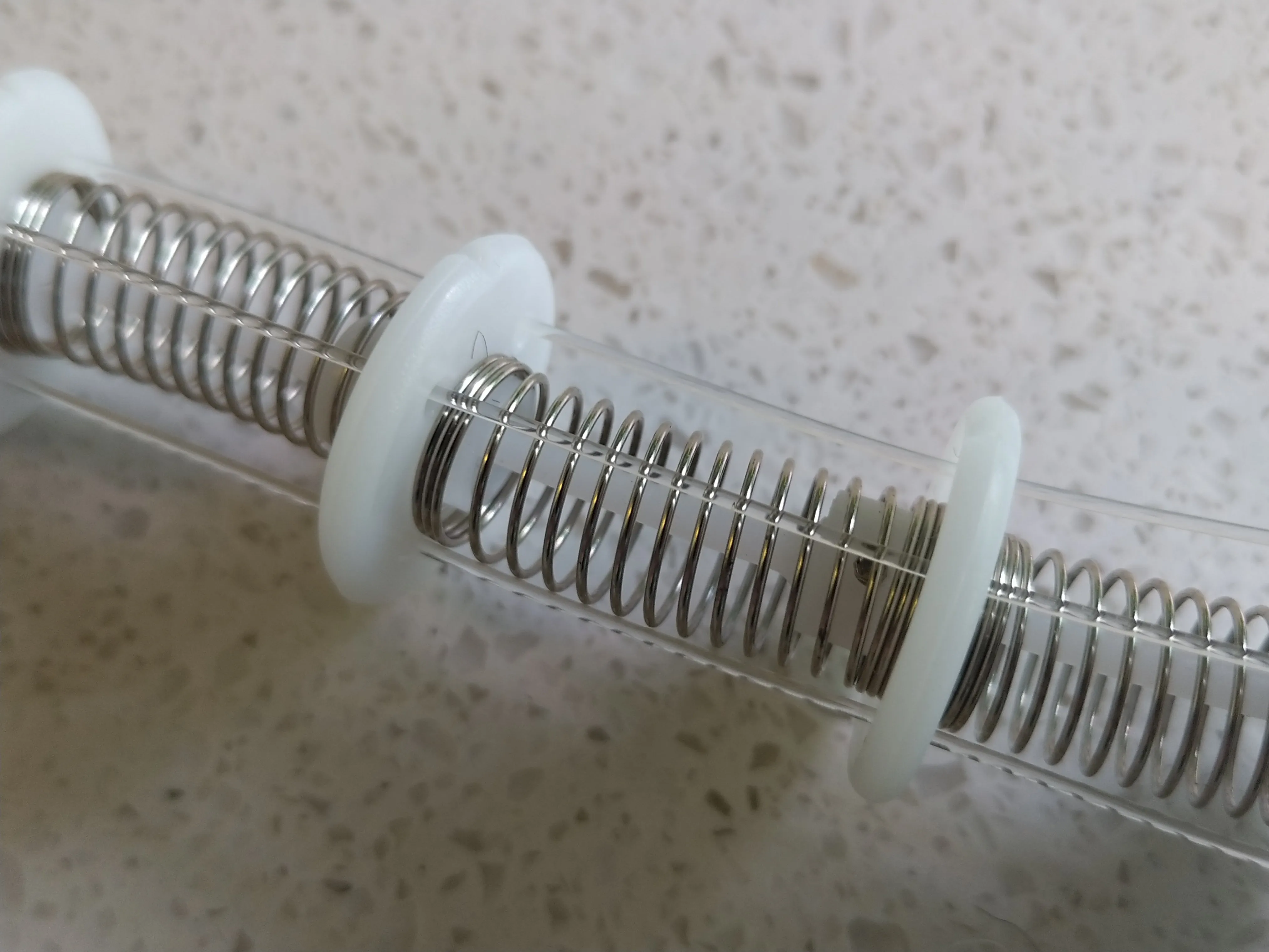
Шаг 5 Механизм хвоста робота
Хвост имеет 2 степени свободы. Один сервопривод используется для оси X, другой - для оси Y. Сам хвост состоит из пружин, а в качестве 'сухожилий' выступают растягивающиеся кабели.
Шаг 6 Крупные планы основной платы
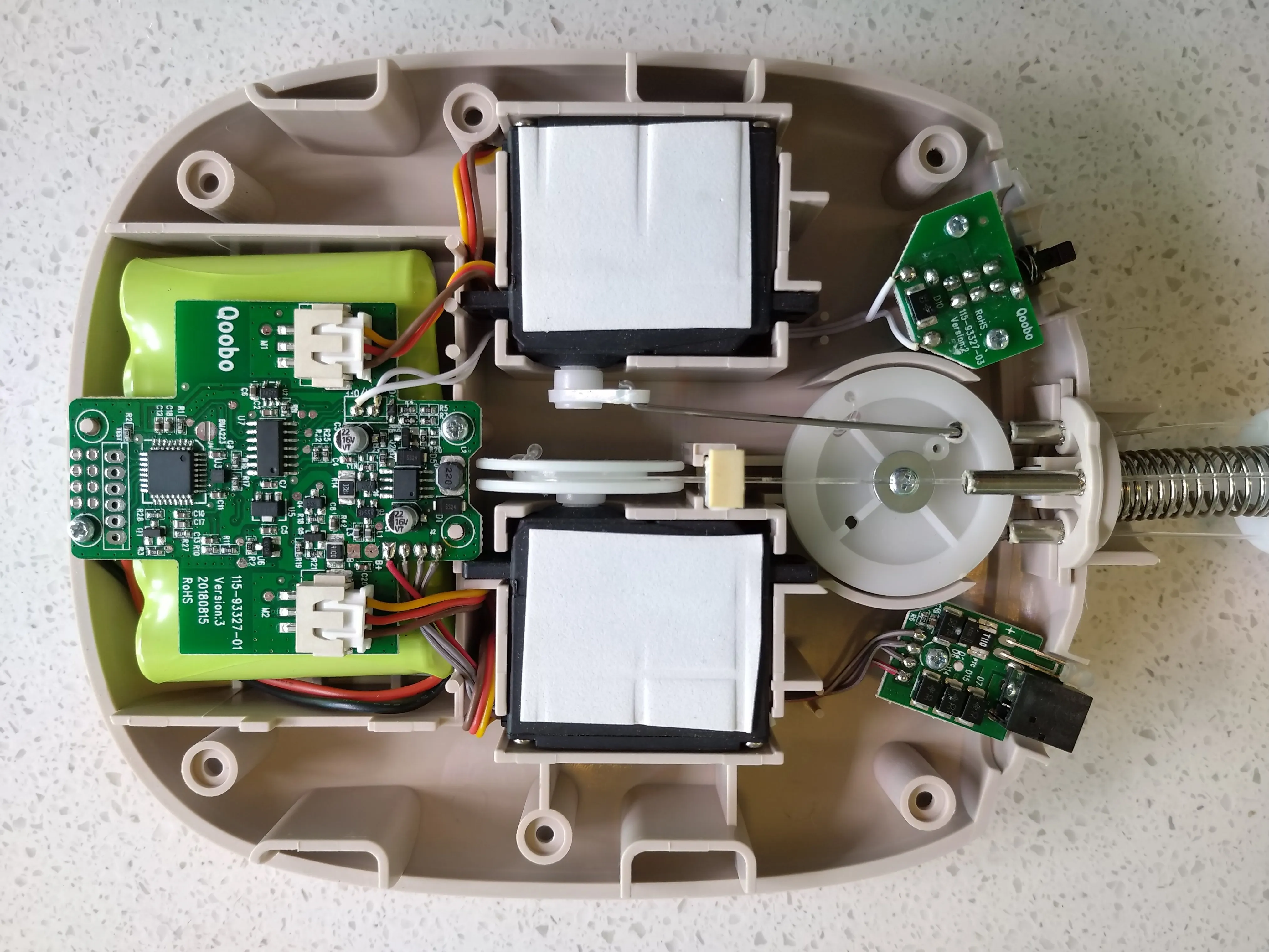
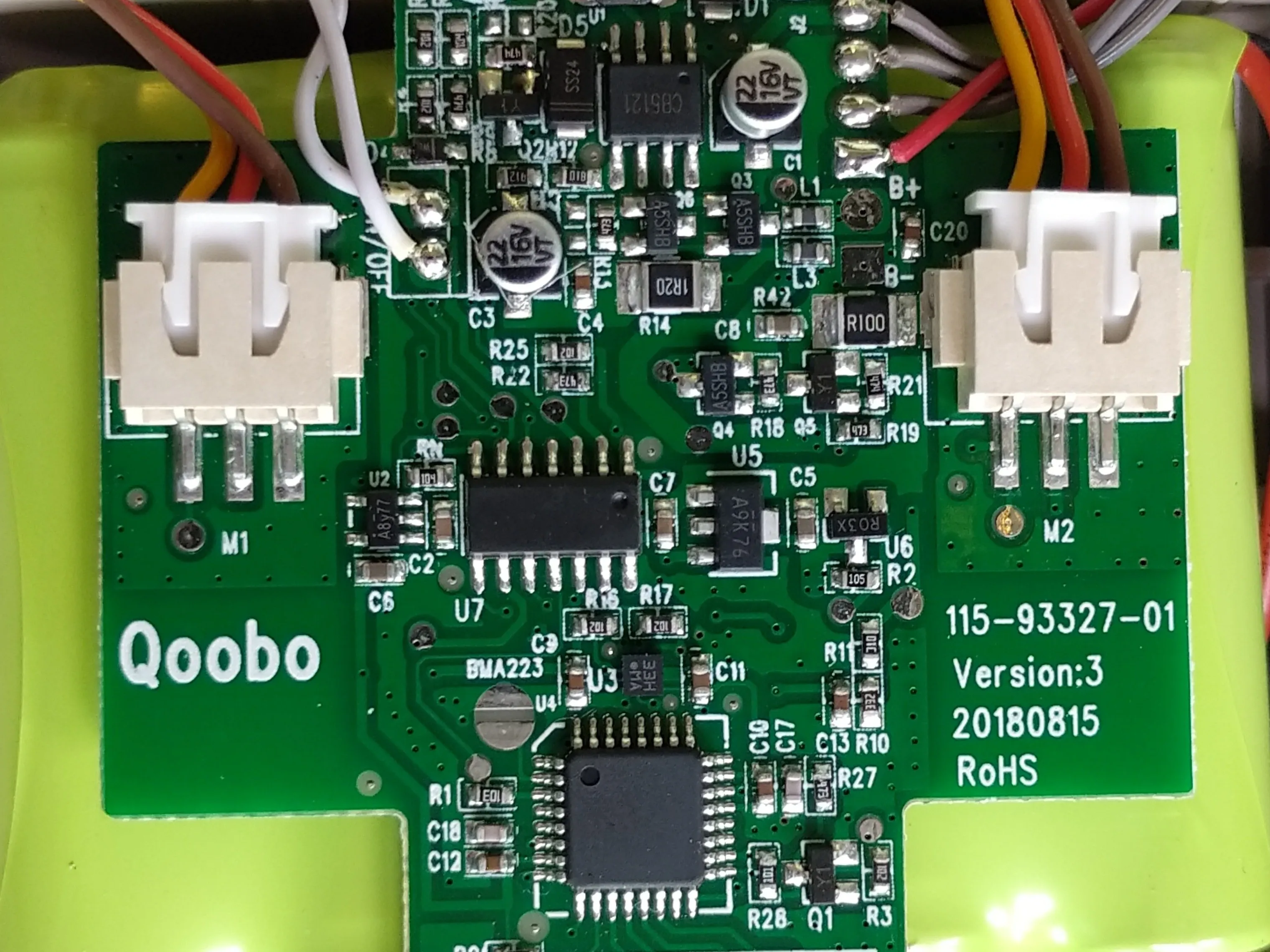
U1: читается как 'CB5121'. Вероятно, PMIC
U4: немаркированная 32-контактная микросхема - почти наверняка основной микроконтроллер.
U3: акселерометр BMA223 (используется для обнаружения движения, когда подушка должна вилять хвостом)
U7: немаркированная 14-контактная микросхема.
Есть незаполненный 6-контактный заголовок, который выглядит как последовательный порт (UART).
Есть незаполненный 8-контактный заголовок, который, вероятно, предназначен для отладки / прошивки
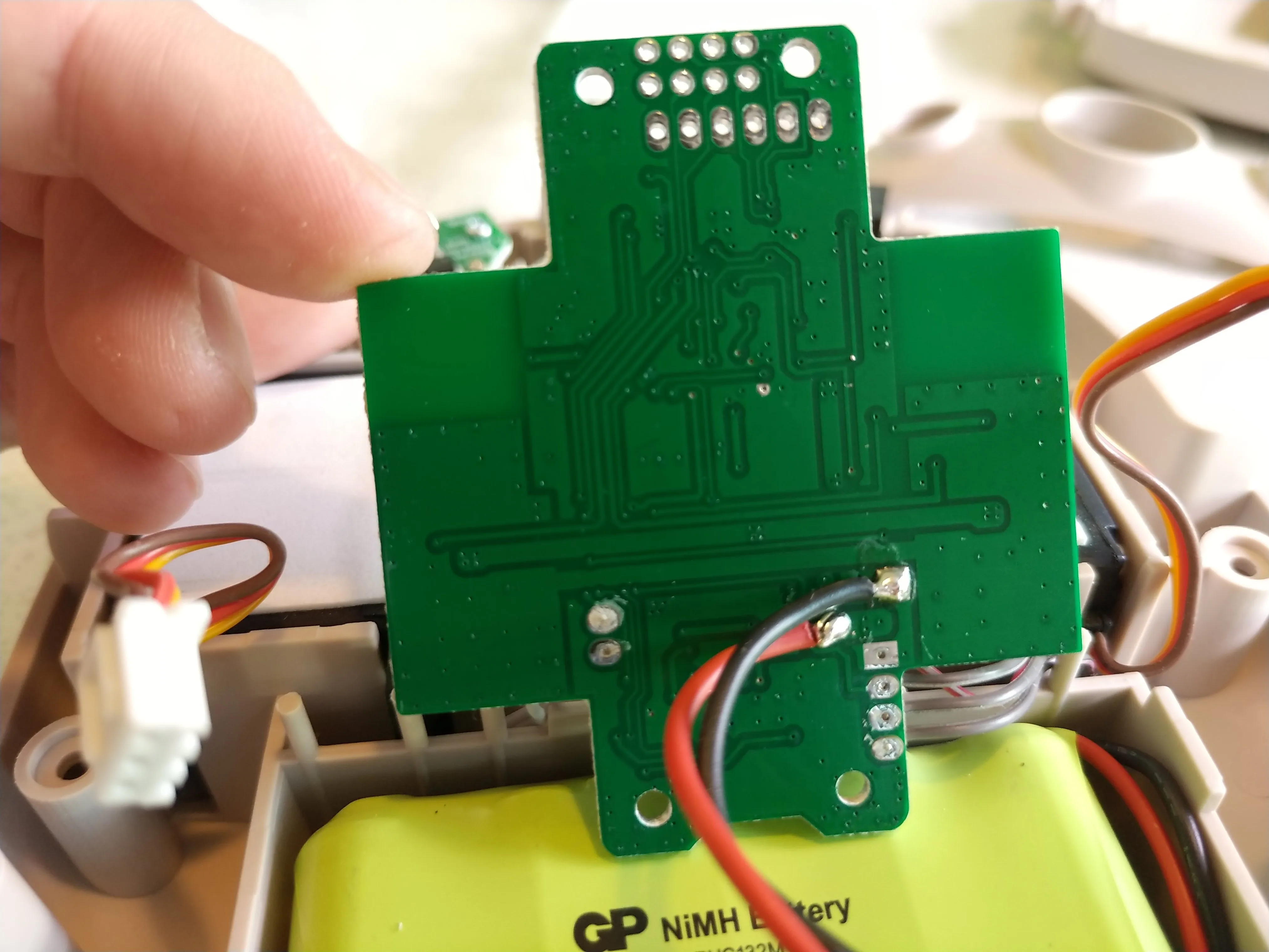
Шаг 7 Другие платы



Простая плата для выключателя питания.
На другой плате находится порт для зарядки и светодиод
Никель-металлогидридный аккумулятор на 6,0 В и 1300 мАч
Шаг 8


Сервоприводы без маркировки, но, похоже, это стандартные сервоприводы хобби-класса.